

サイバーナイフの基本構造
直線加速器 ( リニアック )
X線エネルギー6MVのコンパクトな直線加速器が搭載されています。
また12種類のコリメータに加えて、可変絞り機能も搭載され、線量分布の適正化が可能になります。
ロボットマニピュレータ
6軸駆動による自由な動きと、高い繰り返し精度(再現性±0.20mm)を持つ産業用ロボットです。
先端に取り付けた直線加速器は広範に照射することが可能です。
病変追尾装置( Target Locating System )
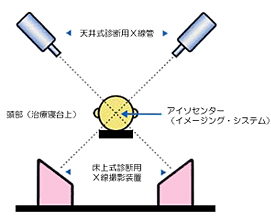
2方向からX線撮影された画像と、治療計画時に作成された画像を瞬時に比較して、身体・病変の位置を検知します。
動きがあれば、ロボットがその差を自動で補正し治療計画通りに照射します。
呼吸追尾システム ( Synchrony Respiratory Tracking System )
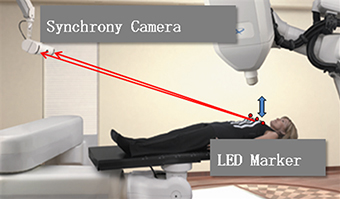
体表に装着されたLEDマーカーの動きから、四次元相関モデルを作成し、呼吸による病変の動きを検知します。病変を追い続けながら照射します。
治療用コンピュータ( Treatment Planning System : TPS )
サイバーナイフ専用治療計画装置「Multi Plan」は、高性能コンピュータにより、症例ごとの治療目標に合わせた最適の線量分布が得られます。


